


















3D-Umgebungserfassung mit neuester Sensorik und Algorithmik

Robuste 3D-Umgebungserfassung mit neuester Sensorik und Algorithmik.
Fährt ein vollautonomes Robotaxi auch noch bei dichtem Nebel und starken Regen?
(16.10.2019)
Einen Einblick in die 3D-Umgebungserfassung für selbstfahrende Autos bei der Daimler AG erhielten am Mittwoch 16. Oktober 2019 16 Teilnehmer bei der Fachveranstaltung der Bezirksgruppe Ulm im Forschungszentrum der Daimler AG in Ulm.
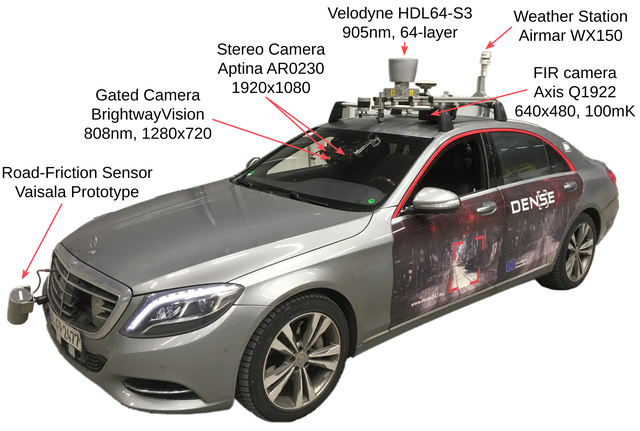
Die im Rahmen des EU-Projekts DENSE: ADverse wEather eNvironment Sensing systEm (www.dense247.eu) erarbeiteten Forschungsergebnisse im Bereich der 3D-Umgebungserfassung bei schlechten Wetter präsentierte uns Herr Tobias Gruber, Doktorand bei der Daimler AG.
LiDAR Systeme (Light Detection And Ranging) sind wesentliche Eckpfeiler des autonomen Fahrens, sind aber zu teuer, haben eine geringe räumliche Auflösung und sind nicht geeignet bei widrigen Wetterbedingungen.
Eine Gated Camera ist ein aktiver Sensor, der die Szene mit Laserdioden im nahen Infrarot (NIR) beleuchtet. Durch die Zeitsynchronisation mit der Kamera, können nur Photonen aus einem festgelegten Entfernungsbereich erfasst werden. Es werden sequentiell werden mehrere Bilder erstellt, die unterschiedliche Tiefenbereiche ausleuchten. Objekte erscheinen dadurch in unterschiedlichen Intensitäten in jedem Bild. Diese Information kann ausgenutzt werden, um 3D-Informationen über die gesamte Szene zu erhalten. Durch das Gated Prinzip ist es auch möglich, Vordergrund und Hintergrund auszuschneiden, d.h. die Rückstreuung bei Nebel kann stark verringert werden. Deshalb ist auch bei schlechten Witterungsbedingungen noch eine zuverlässige 3D-Umgebungserfassung möglich.
![]()
Zur Entwicklung von Algorithmen zur 3D-Objekterkennung, Sensorfusion, Gated-Tiefenschätzung wurden bei sehr schlechtem Wetter (Schnee, Regen, Nebel) in Finnland, Schweden und Dänemark in vier Woch
en mehr als 8.000 km Datenerhebung mit dem Versuchsauto durchgeführt. Mit diesen Daten werden Algorithmen wie z.B. zur 3D-Umgebungserfassung trainiert. Ziel des Trainings ist es, mehrere Millionen Filterkoeffizienten zu bestimmen, die die Abbildung von drei Gated Bildern auf eine 3D-Tiefenkarte beschreiben (Deep Learning). Durch intelligente Algorithmen wird es dadurch möglich, eine einfache und kostengünstige Kamera in einen hochauflösenden Flash LiDAR zu verwandeln.
Nach der Vorstellung der Ergebnisse konnten wir bei Testfahrten auf dem Werksgelände den praktischen Einsatz der Sensoren und Kameras sehen.
Einen herzlichen Dank an die Daimler AG und ihren Referenten Tobias Gruber für den anschaulichen Einblick in die sehr komplexe Entwicklung der zukunftsweisenden 3D-Umgebungserfassung.
Einen schönen gemütlichen Ausklang fand diese Fachveranstaltung der Bezirksgruppe Ulm in der Pizzeria Malizia in Ulm.
Franz Josef Gruber
Bezirksgruppe Ulm, Vorsitzender
Bilder: © Daimler AG und DVW Baden-Württemberg e.V.